
Vor Kurzem hat es mich gepackt und ich habe mich entschieden, einen möglichst günstigen Quadrocopter / Racecopter zu bauen. Ich hatte bis dahin keinerlei Erfahrung mit Flugmodellen und dachte, so ein kleiner und vor allem günstiger Racecopter sollte das Passende für den Einstieg sein. Wie sich relativ schnell herausstellte, ist „günstig“, zumindest wenn man von Null anfängt, nur relativ.
Hängen geblieben bin ich letztendlich bei einem 250er Racecopter, der im Internet vornehmlich unter den Namen QAV250 oder ZMR250 zu finden ist. QAV250 ist ein eingetragener Markenname der Herstellers Lumenier. Das interessiert in China jedoch niemanden und so findet man unter dieser Bezeichnung massenhaft Nachbauten. Die 250 gibt dabei die Motordiagonale von einer zur anderen Achse an: 250mm. Das ist jedoch eher als grober Anhaltspunkt zu sehen, da auch Diagonale von 270mm oder 280mm als 250 bezeichnet werden.
 Die Ausleger zur Befestigung der Motoren
Die Ausleger zur Befestigung der Motoren




Mein Einstieg in die Quadrocopter Welt war zu Beginn mit einem ziemlich hohem Zeitaufwand verbunden. Für mich war es wichtig, zu verstehen wie diese Teile genau funktionieren und welche Komponenten ich für den Erstflug brauche. Solltest Du zur Zeit mit den gleichen Schwierigkeiten zu kämpfen haben oder nur Informationen suchen, soll die nachfolgende Zusammenfassung eine gewisse Hilfestellung leisten. Beachten sollte man jedoch, dass ich die Informationen auch nur nach besten Wissen und Gewissen zusammengetragen habe und kein Anspruch auf Vollständigkeit besteht. Leute die mit Racecoptern länger Erfahrung haben, werden sicherlich hier und da anderer Ansicht sein. Und das ist ok so.
Zunächst geht es darum, was man eigentlich alles braucht um die Kiste abheben zu lassen. Wer von Null anfängt wird staunen, welcher Rattenschwanz hinter „Ich kaufe mir mal einen Quadrocopter“ hängt. Wer keine Lust hat den ganzen Text zu lesen und schnelle Infos möchte, der findet hier eine Teileliste der von mir verbauten bzw. benötigten Komponentnen.
Technische Voraussetzungen
Für den Zusammenbau ist ein gundlegend technisches Verständnis notwendig. Hat man das nicht, sollte man es entweder komplett lassen oder viel Zeit investieren. Eine andere Alternative wäre es, einen vormontieren und flugfertigen Quadrocopter von der Stange zu kaufen. Das soll hier aber keine weitere Rolle spielen.
Wer noch nie einen Lötkolben in der Hand gehalten hat, sollte sich zunächst einen kaufen und dann ein bisschen üben, bevor man sich an den Copter heranwagt. Grundlegend ist es aber ziemlich einfach und auch für Laien gut zu schaffen. Hier eine kurze Zusammenfassung, was man so im Haus haben sollte:
- Lötkolben, Lötzinn
- ggf. eine dritte Hand
- Schwarfes Messer oder Abisolierzange
- Elektronik Zangensatz
- Feinmechaniker Set (Imbus und co.)
Einen Racecopter Bausatz oder alles einzeln kaufen?
Ich habe mich eine ganze Zeit damit beschäftigt, was für mich günstiger sein würde. Ich habe also sowohl komplette Bausätze als auch die Kosten der

Einzelkomponenten miteinander verglichen. Zu guter Letzt bin ich zum Schluss gekommen, dass ich als Einsteiger mit einem Bausatz am günstigsten davon komme. Dieser beinhaltet die aufeinander abgestimmen Komponenten und man hat als gänzlich Unerfahrener erstmal eine solide Grundlage. Gleichwenn Profis sich hier sicherlich anders entscheiden würden.
Bei meiner Suche habe ich diverse nationale und internationale Online-Shops abgegrast. Bei beispielsweise Banggood, Aliexpress oder GearBest findet man oft sehr günstig die Einzelkomponenten, muss dann jedoch damit leben, dass der Versand oft Wochen in Anspruch nimmt. Das Kaufen eines Komplettsets aus China habe ich vermieden, da ich die Befürchtung hatte, dass entweder Einfuhrumsatzsteuer (ab 22 Euro Warenwert inkl. Versand) oder Zoll (ab 150 Euro Warenwert inkl. Versand) erhoben werden könnte. Für mehr Informationen über Einfuhrumsatzsteuer und Zoll schaut man am besten hier vorbei.
Bei n-factory.de habe ich ein schönes Komplettset gefunden, welches lange Zeit mein Favorit war. Daran hat mir besonders gut gefallen, dass man den Copter sowohl mit 3S als auch 4S Akkus betreiben kann und er somit etwas „zukunftssicherer“ ist.
Schlussendlich habe ich mich dann jedoch für diesen günstigeren Bausatz entschieden und bin sehr zufrieden damit. Einerseits hat mir der kostenlose und schnelle Prime-Versand von Amazon gefallen, andererseits konnte ich hier direkt die positiven Berwertungen des Bausatzes lesen.

Der Bausatz
Kauft man den besagten Bausatz kann man sich zumindest sicher sein, dass die Komponenten miteinander harmonieren. Im Grunde ist es aber ein typischer ZMR250 China Frame, der sicherlich mit der Qualität und dem Gewicht von teureren Frames nicht mithalten kann.
Dafür bekommt man aber auch alle Ersatzteile in Shops wie Banggood und AliExpress zu erschwinglichen Preisen. Das war für mich als Einsteiger ein wichtiger Punkt, denn ich wollte für den Fall der Fälle gut und günstig an Ersatzteile kommen. Und sollte der Frame tatsächlich mal vollkommen geschrottet werden, ist der Verlust, gemessem am Preis, nicht besonders hoch. Hier ein kurzer Einblick, was man bei diesem Frame für aktuell 119 Euro bekommt:
ZMR250 Carbon Frame
Der 250er Carbon Frame ist mit ca. 150g im Vergleich zu anderen Frames kein Leichtgewicht und spielt eher im Mittelfeld. Für den Einstieg aber vollkommen ausreichend. An ihm werden alle Komponenten befestigt. In der „Vollausstattung“, also mit FPV (First Person View) Kamera, Sender, Antennen, Akku und co. kann es schnell ziemlich eng werden. Beim Anbau der Komponenten sollte man daher mit Bedacht vorgehen.
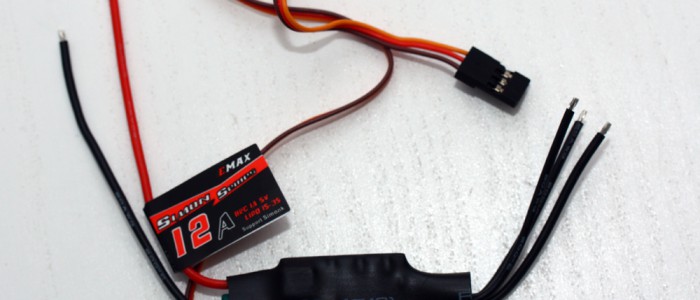
12A Simonk Rapid ESCs (Electronic Speed Control) mit integriertem BEC (Battery Eliminator Circuit)
Die Regler für die Motoren (Motorsteller, Motorregler, Fahrtregler). Sie versorgen die angeschlossenen Motoren mit Spannung und regeln deren Leistung. Sie werden später über die OpenPilot Software konfiguriert und sorgen dafür, dass die Motoren mit der korrekten Drehzahl laufen. Die integrierten BECs wandeln die 12 V vom LIPO Akku in 5 V für den Flight Controller um. Daher werden die Regler später sowohl an das Power Distribution Board gelötet als auch mit dem Flight Controller über dreipolige Stecker (Signalleitung) verbunden.
Hier ein paar Werte der Regler, welche für uns später noch wichtig sein werden:
- Burst Strom: 16 A / 10 sec
- Maximale Dauerlast: 11 A
- BEC: 5 V / max. 1 A
MT2204 2300KV Brushless Motoren

Von den Motoren bekommt man jeweils zwei im Uhrzeigersinn drehende und zwei gegen den Uhrzeigersinn drehende. Die 2300KV geben die maximalen Umdrehungen der Motoren pro Volt an. Anhand der maximalen Spannung der Motoren (hier: 7,4 V bis 11,1 V) kann man erkennen, dass diese mit 2S oder 3S Akkus (Akkus mit 2 oder 3 Zellen) betrieben werden müssen. Empfohlene Propeller sind hier Größen zwischen 5×3 und 6×3 Zoll.
Zusammenfassend die wichtigsten Werte der Motoren:
- KV: 2280
- Zellen: 2S bis 3S
- Propeller: 5″ bis 6″
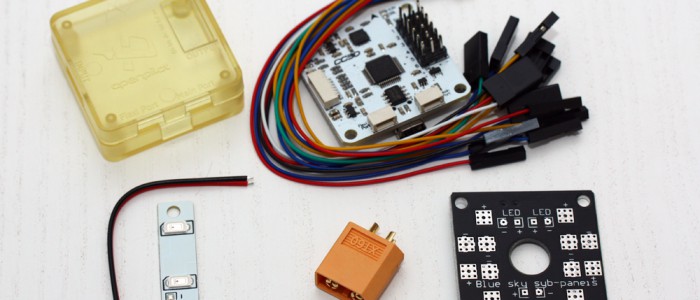
Power Distribution Board (PDB)
Wie der Name schon sagt, verteilt das Power Distribution Board den Strom vom Akku an alle angelöteten ESCs und somit weiter an die Motoren. Außerdem werden hier die LEDs angelötet.
Flight Controller (CC3D von OpenPilot)
Der Flight Controller wird über einen der vier angeschlossenen Regler mit BEC mit Strom versorgt. Er sorgt dafür, dass der Copter stabilisiert wird und in der Luft bleibt. Der Flight Controller wird später mit der OpenPilot Ground Control Software konfiguriert und auf einen 250er Race Copter angepasst.

Rotorblätter (5030 und 6030)
Die Größe 5030 und 6030 passen sehr gut an einen 250er Racecopter. Beim Bausatz sind sowohl noname Carbon Rotorblätter dabei als auch Gemfan Rotoblätter. Über die Letztern hatte ich ziemlich viel Schlechtes gelesen, war aber letzten Endes überrascht, wie oft sie „harte“ Landungen überstehen. Meiner Meinung nach sind diese günstig und gut und gerade zu Beginn empfehlenswert. Man kann aber auch die Größe 5040 verwenden. 5″ oder 6″ Rotorblätter.
LED Boards (blau und weiß)
Die LEDs sind wichtiger als man zunächst vermuten würde. Spätestens nach den ersten Testflügen, weiß man warum. Ab einer gewissen Entfernung kann man die Lage des Copters nur noch schwer einschätzen. Die LEDs in den Farben blau und weiß helfen auch über weitere Entfernungen die Lage des Copters einzuschätzen. Fliegt man später im First Person View sind die LEDs hilfreich anderen Piloten den eigenen Standort kenntlich zu machen.
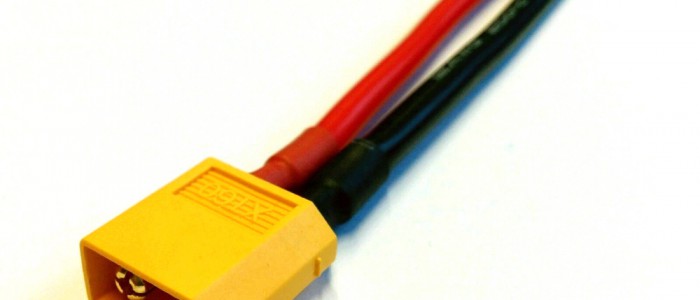
XT60 Stecker (male)
An diesen Stecker kann später der Akku angeschlossen werden. Sicher kann man auch eine Vielzahl anderer Steckverbinder (T-Stecker, XT90 Stecker)nutzen, der XT60 Stecker ist aber nunmal im Set dabei und erfüllt seinen Zweck sehr gut.
Was braucht man noch?
Allein mit dem Bausatz ist es jedoch nicht getan. Das Power Board sowie der Flight Controller wollen am Frame befestigt werden. Auch der Akku muss später irgendwie mit dem Power Board verbunden und möglichst fest auf den Frame geschnallt werden. Hierfür benötigt man noch einige Kleinteile, welche im Folgenden aufgeführt werden.
M3 Nylon Abstandshalter
Für die Befestigung von Power Board und Flight Controller eignen sich am besten M3 Nylon Schrauben, Muttern und Abstandshalter. Ich habe mir dieses Set bei Amazon bestellt. Das passt soweit, ist aber vielleicht nicht ganz optimal. Ich musste zum Beispiel die unteren vier Abstandshalter, welche bei mir das Power Board halten, etwas mit einem scharfen Messer kürzen. Danach kommen ungekürzte Abstandshalter drauf, dann der Flight Controller und jeweils eine Mutter. Höher darf es nicht werden, sonst passen die Stecker für den Flight Controller nicht mehr in den Frame. Dazu aber später mehr.
Kabel
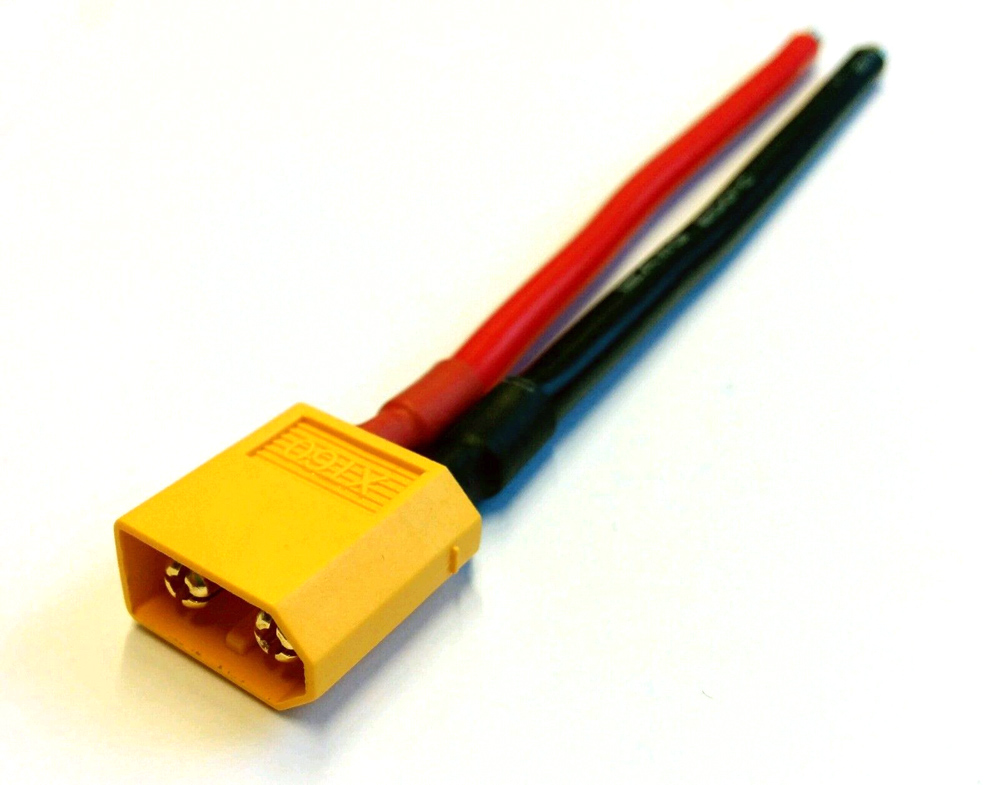
Für ein komfortables Anstecken des LIPO Akkus benötigt man noch ein kurzes Stück Kabel, an welches später der dem Set beiliegende XT60 Stecker gelötet wird. So trivial wie es klingen mag, ich habe mich damit anfangs etwas schwer getan. Kabel hatte ich keine passenden herumliegen und so habe ich mich erst eine halbe Ewigkeit belesen, welche Dicke das Kabel haben muss um nachher aus Unsicherheit und sicher auch etwas Bequemlichkeit doch einfach fünf vorgelötete Kabel bei Hobbyking (XT60 Male w/ 12AWG Silicon Wire 10cm (5pcs/bag) zu kaufen.
Ich musste aber feststellen, dass die Kabel mit 12AWG Dicke relativ überbemessen sind. Geht aber trotzdem und ich weiß fürs nächste Mal, dass Kabel mit 16AWG besser geeignet sind.
Kabelbinder, Klettband, Schraubensicherungslack und USB Kabel
Man braucht Kabelbinder. Viele Kabelbinder. Alleine beim rumprobieren, wo welches Kabel später langläuft, wo die ESCs befestigt werden u.s.w., habe ich einige Kabelbinder verbraucht. Man kann nie genug Kabelbinder haben. 😀
Für die spätere Befestigung vom Akku benötigt man irgendwelche Klettbänder (Akku Straps), welche um den Akku und den Frame gespannt werden und so den Akku ihn so in Position halten. Trotzdem wird man später schnell merken, dass der Akku trotz des Akku Straps noch reichlich Spiel hat und sehr leich herausrutschen kann. Darum habe selbstklebendes Klettband gekauft und eine Lage auf den Frame und die andere Lage auf den jeweiligen Akku geklebt. Das hält sehr gut!
Später wird der Quadrocopter andauernden Vibrationen ausgesetzt sein. Es lohnt daher die Schrauben für den Frame vor bzw. beim Zusammenbau mit Schraubensicherungslack zu versehen.
Akkus und Ladegerät
Für den Racecopter habe ich mir einen 1300 mAh und zwei 1500 mAh Akkus von Hobbyking besorgt. Dort sind sie relativ günstig und soweit wie ich einschätzen kann, von guter Qualität. Wichtig ist, dass man unter anderem auch hier auf den entsprechenden Anschluss Typ achtet, in meinem Fall ist das ein XT60 Stecker. Ansonsten ist Umlöten angesagt. Mittlerweile fliege ich fast ausschließlich mit den 1500 mAh Akkus und komme so auf eine Flugzeit von ca. 10 Minuten. Der 1300 mAh Akku speist zur Zeit meinen FPV Monitor.
Auch mit den Akkus habe ich mich zunächst etwas schwer getan. Zum Beispiel konnte ich nichts mit den angegeben C-Werten anfangen. Für den Kauf der Akkus habe ich dann drei wichtige Eigenschaften herangezogen und für mich versucht zu klären:
Die Zellenanzahl und Nennspannung
Der angebene S-Wert gibt die Zellenanzahl und die Nennspannung des Akkus an. Eine einzelne Zelle hat stets eine Nennspannung von 3.7 V. Da dieses Modell mit Motoren und Reglern ausgerüstet ist, welche mit 3S Akkus betrieben werden, ergibt sich eine gesamte Nennspannung des Akkus von 11.1 V (3×3.7 V).
Die Kapazität
Die Kapazität ist die Energie, welche im Akku gespeichert ist. Sie wird stets mit mAh angegeben. Bei der Entladung des Akkus muss darauf gedachtet werden, dass die Nennspannung einzelner Zellen nicht unter 3 V sinkt, denn dann ist er mit hoher Wahrscheinlichkeit tiefenentladen und kaputt. Für so einen kleinen Racecopter sind kleine Akkus mit 1300mAh oder 1500mAh sehr gut geeignet. Akkus mit 2200mAh sind dementsprechend größer und lassen den Copter eher schwerfällig und weniger agil werden.
Der Entladestrom
LIPO Akkus sind mit einem C-Wert versehen, welcher über den Entladestrom informiert. Hierbei wird meist ein konstanter Entladestrom und ein burst Entladestrom angeben. Wie der Name schon sagt, kann der Akku den konstanten Entladestrom durchgehend liefern. Der Burst Entladestrom hingegen liegt nur für ein paar wenige Sekunden an, bevor er einbricht. Anhand der C-Werte kann man nun errechnen, ob der jeweile Akku ausreichend Strom für die Motoren liefert.
Auf der Hersteller Webseite der EMAX Motoren findet man folgende Informationen:
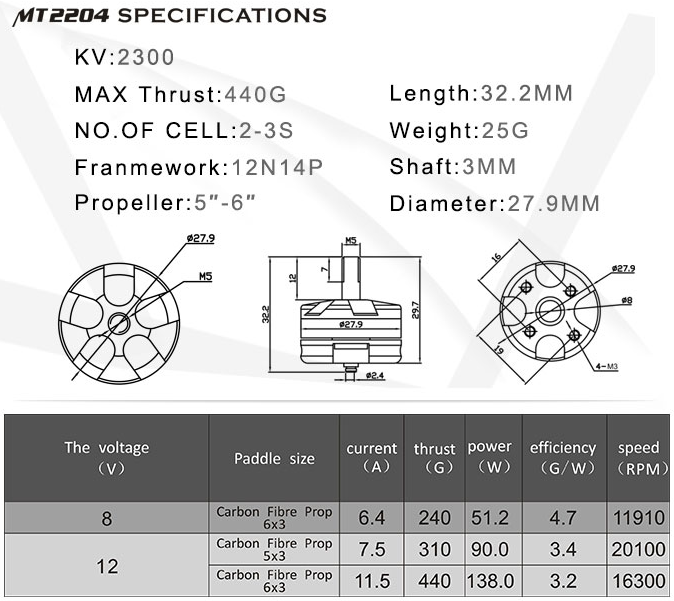
Da der Copter mit 3S Akkus fliegen wird, interessieren in erster Linie die unteren zwei Zeilen der Tabelle. Hier ist unter anderem die Propeller Größe und der maximal benötigte Strom mit current (A) angegeben. Geht man also davon aus, dass er Copter mit 5×3 Propellern gefolgen wird, wird für alle vier Motoren zusammen 30 A (4 x 7.5 A) unter Volllast benötigt. Mit größeren Propellern wären es dann schon 46 A (4 x 11.5 A).
Ein Akku mit 1500 mA und 25C constant und 50C burst liefert einen maximalen dauerhaften Entladestrom von 37,5 A (25C x 1500 mA) und einen kurzzeitigen burst Entladestrom von maximal 75 A (50C x 1500 mA). Ausreichend für die gewählte Regler/Motor Konfiguration.

Zu Beginn hatte ich noch kein Gefühl, wann genau der Akku leer sein könnte und zugegeben habe mir auch keinen großen Kopf darüber gemacht. Ich dachte, ich würde schon merken, wenn der Copter nicht mehr so viel Power hat. Teilweise ist das auch so. Ist der Akku leer gesaugt, bemerkt man, zumindest bei Vollgas, einen gewissen Leistungsverlust. Beim reinen Schwebeflug, welcher gerade am Anfang der Fliegerkariere hoch im Kurs ist, merkt man davon jedoch reichlich wenig. Und so war es teilweise Glück, dass die Kiste durch einen leeren Akku nicht einfach abgestürzt ist. Es ist nämlich so, dass der Copter bei leerem Akku unkontrolliert zur Seite kippt und wie ein Stein vom Himmel fällt. Weil ich mich nicht nur auf mein Gefühl und den Timer in der Fernbediennung verlassen wollte, habe ich mir diesen LIPO Checker für günstig Geld zugelegt. Fällt die Spannung einer der Zellen unter einen bestimmten Wert, fängt der LIPO Checker sehr laut an zu piepen. Diesen Piepen hört man auch noch aus großer Entfernung und so hat man die Möglichkeit den Copter in Ruhe zu landen.
Fernbedienung (Sender) und Empfänger
Ich habe mich auch hier eine ganze Weile belesen, welche Fernbedienung für meine Belange die richtige ist. Natürlich haben alle ihre Vor- und Nachteile. Ich habe mich letzten Endes für die Graupner MZ-12 in Verbindung mit dem Graupner GR12L Emfpänger entschieden.
Wenn du mehr über die Verkabelung meines Racecopters wissen möchtest, schaue hier vorbei.






Sehr gut beschrieben. Es ist ein sehr spannendes Thema. Ich habe gerade meinen ersten 450er Quadrocopter selber zusammengebaut. Als nächstes ist dann auch ein Racecopter dran.